Analyse biomécanique de la foulée du robot humanoïde Atlas – Par Fred Brigaud
Il semblerait que nous ayons pour l’instant encore l’avantage sur Atlas (tel est son nom) au regard de cette première analyse technique de sa gestuelle. Une gestuelle qui comporte des asymétries et quelques défauts qui limitent son potentiel comme nous l’expliquerons. Cependant, une fois ces paramètres réglés, nous risquons d’être à la traine…
Pour cette analyse nous porterons notre attention sur la façon dont il mène l’action plus que sur la finalité de l’action qu’il mène. Celle-ci n’étant que la conséquence de la gestuelle mise en place, son déroulement. Par exemple lorsqu’il saute sur place tout en pivotant sur lui-même, ce n’est pas le fait qu’il y parvienne qui nous intéresse mais la façon dont il effectue cette action. La façon dont il coordonne les différentes parties de son corps et les mouvements qu’il produit, notamment pour se stabiliser une fois qu’il reprend appui. Des mouvements semblables à ceux que produit spontanément un être humain coordonné et un minimum expérimenté dans la même situation.
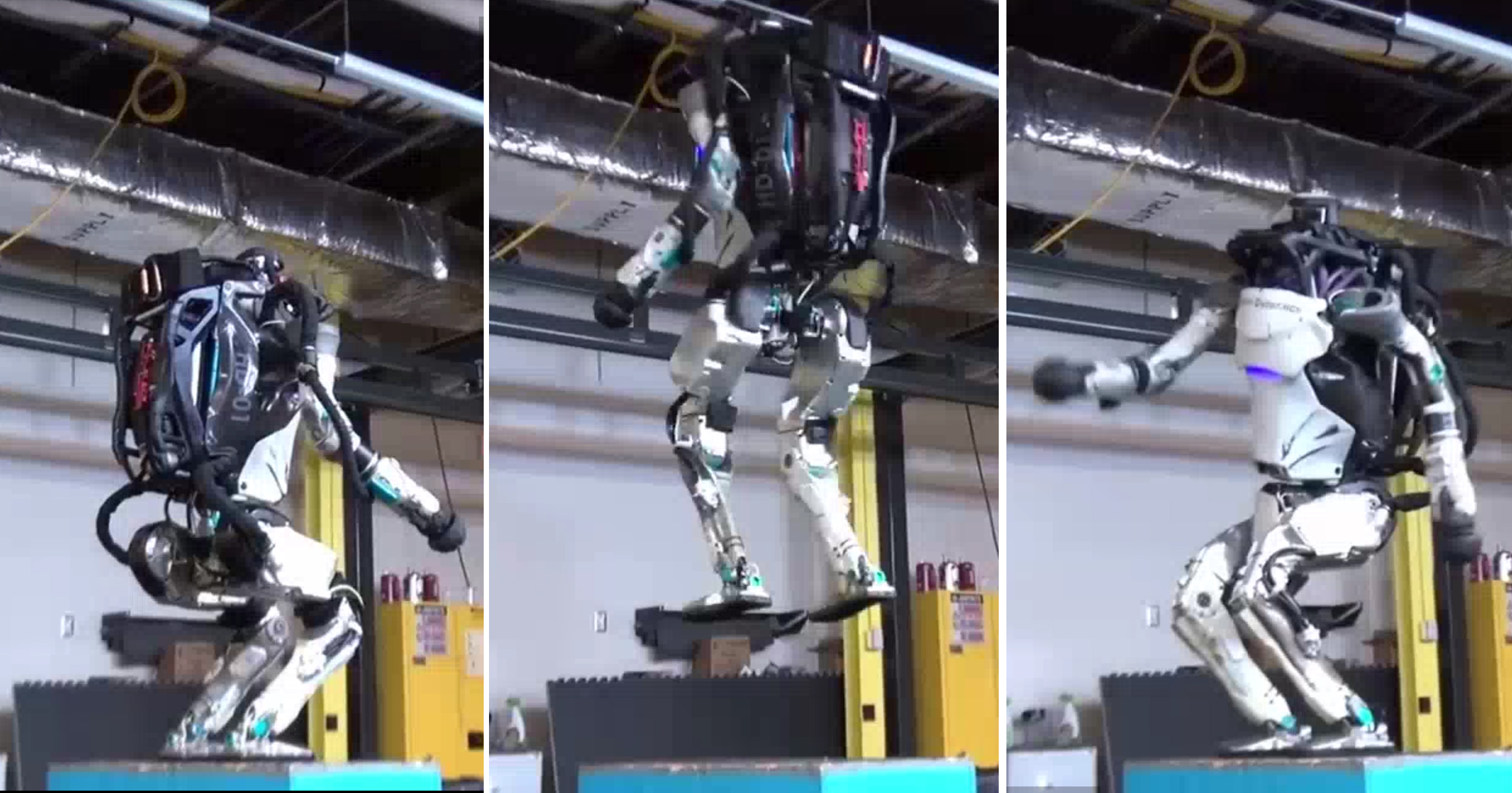
Par ailleurs, il serait intéressant de savoir si les ingénieurs ont du programmer spécifiquement une série de mouvements des bras et du buste pour permettre à Atlas de se stabiliser ou s’ils se coordonnent d’eux-mêmes en réponse à un déséquilibre, percevant l’effet de la mise en mouvement de leur masse… Un système nettement plus efficace qui offre un panel de mouvements infinis s’ajustant instantanément et avec précision à ses besoins. Dans ce domaine Atlas sera rapidement plus efficace que nous car la peur de chuter peut venir altérer le déroulement de nos automatismes ce qui ne sera pas son cas… mais revenons-en au sujet qui nous intéresse aujourd’hui, qui de l’Homme ou du robot court le « mieux » !?
Anatomie comparée
Atlas (Robot Humanoïde)
- Taille : 1.5 m
- Poids : 75kg
- Source d’énergie : Batteries électriques
- Système moteur : Hydraulique
- Nombre d’articulations : 28 articulations
- Charge utile : 11kg
Vous (Etre humain)
- Taille : la vôtre
- Poids : le vôtre
- Source d’énergie : ATP (Adénosine Triphosphate)
- Système moteur : les muscles
- Nombre d’articulations : Un chiffre qui varie entre 220 et 340 selon ce que l’on prend en considération mais qui est à n’en pas douter beaucoup plus élevé que notre cher Atlas. Rappelons que le corps possède 206 pièces osseuses… Je vous laisse calculer le nombre d’articulations qui en découle.
- Charge utile : Chez les Népalais la charge utile peut atteindre jusqu’à 50/60kg
La bipédie du robot
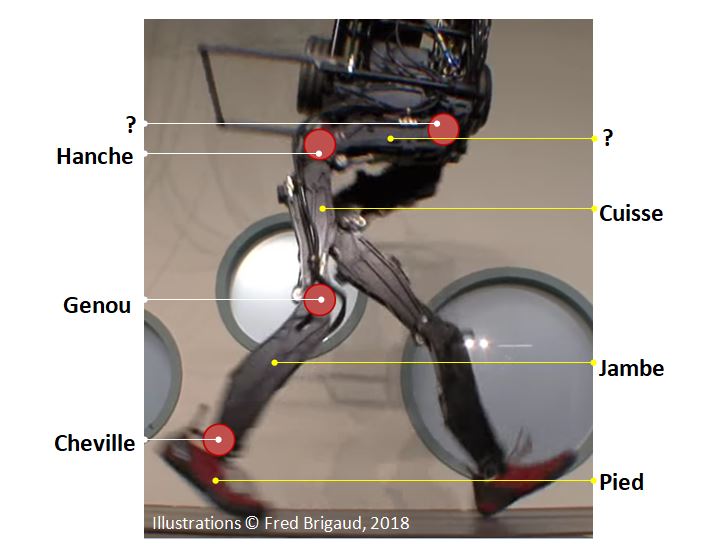
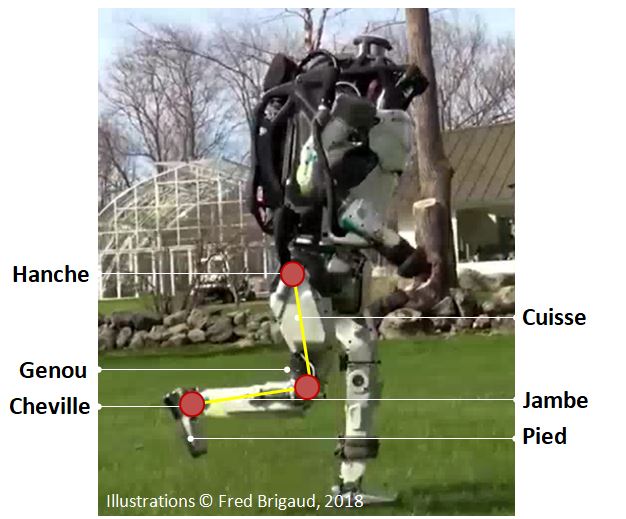
Pour faciliter la comparaison entre la locomotion humaine et la locomotion robotique nous emploierons les mêmes termes anatomiques et biomécaniques. L’architecture et les mouvements du robot étant calqués sur ceux de l’Homme.
Il est intéressant d’observer l’évolution de la bipédie chez les robots et de la comparer à la nôtre. Régulièrement des étapes sont franchies dans ce domaine permettant à des robots de marcher, voire de courir, comme en témoigne cette vidéo. En parcourant la chaîne Youtube de cette firme nous remarquons que les ingénieurs ont essayé différentes formes de ‘’jambes’’, ajoutant des articulations et des segments supplémentaires comparativement aux nôtres, jusqu’à tendre progressivement vers notre anatomie et certaines de ses subtilités. Rappelons que l’équilibre, la stabilité et l’aisance de notre locomotion se trouvent justement dans les subtilités acquises après des millions d’années d’évolution, ‘’sélectionnant’’ progressivement les mutations qui constituaient un avantage évolutif face aux contraintes du milieu.
Un patron de course singulier
Il semble courir puisque sa foulée comporte une phase de suspension (sans appui) précédée et suivie d’une phase d’appui unipodal (un seul pied au sol) ; à aucun moment les deux pieds sont en contact avec le sol comme dans la marche. Cependant, sa faible cadence de 138ppm (pas par minute) sur le plat associée à une importante oscillation verticale l’amène à bondir d’un pied sur l’autre plus qu’à courir. Une analyse plus approfondie révèle que le patron de course déployé par ce robot est particulier et recèle quelques lacunes et asymétries qui limitent comme nous le verrons ses possibilités.
10 points d’analyse
Lorsque nous analysons sa foulée nous observons :
- Une posture antérieure (inclinée vers l’avant) qui lui permet de créer un léger déséquilibre antérieur facilitant la course. Il suffit d’alterner une posture antérieure et une posture verticale pour ressentir l’intérêt de la première, et de percevoir combien celle-ci allège la foulée et accélère l’allure.
- Une cadence de 138 ppm sur le plat. Une valeur très faible, bien en dessous des moyennes (160 ppm) et très loin des 180ppm qu’obtiennent aisément les coureurs avant-pied. Une faible cadence qui l’oblige à bondir d’un pied sur l’autre pour maintenir son allure.
- Une poulaine[1] singulière, très postérieure, qui comporte plusieurs ‘’temps morts’’. Le premier durant la phase aérienne qui précède la prise d’appui ; les jambes sont immobiles jusqu’à ce qu’il prenne appui. Le second durant la phase d’amortissement, puisque ce n’est qu’une fois l’amortissement terminé que la jambe opposée et les bras se mettent en mouvement. Des temps ‘’morts’’ durant lesquels le robot n’est pas réactif. A l’inverse de l’être humain qui combine les mouvements. Le robot n’est pas programmé ou adapté ici pour gérer simultanément amortissement/stabilisation et locomotion.
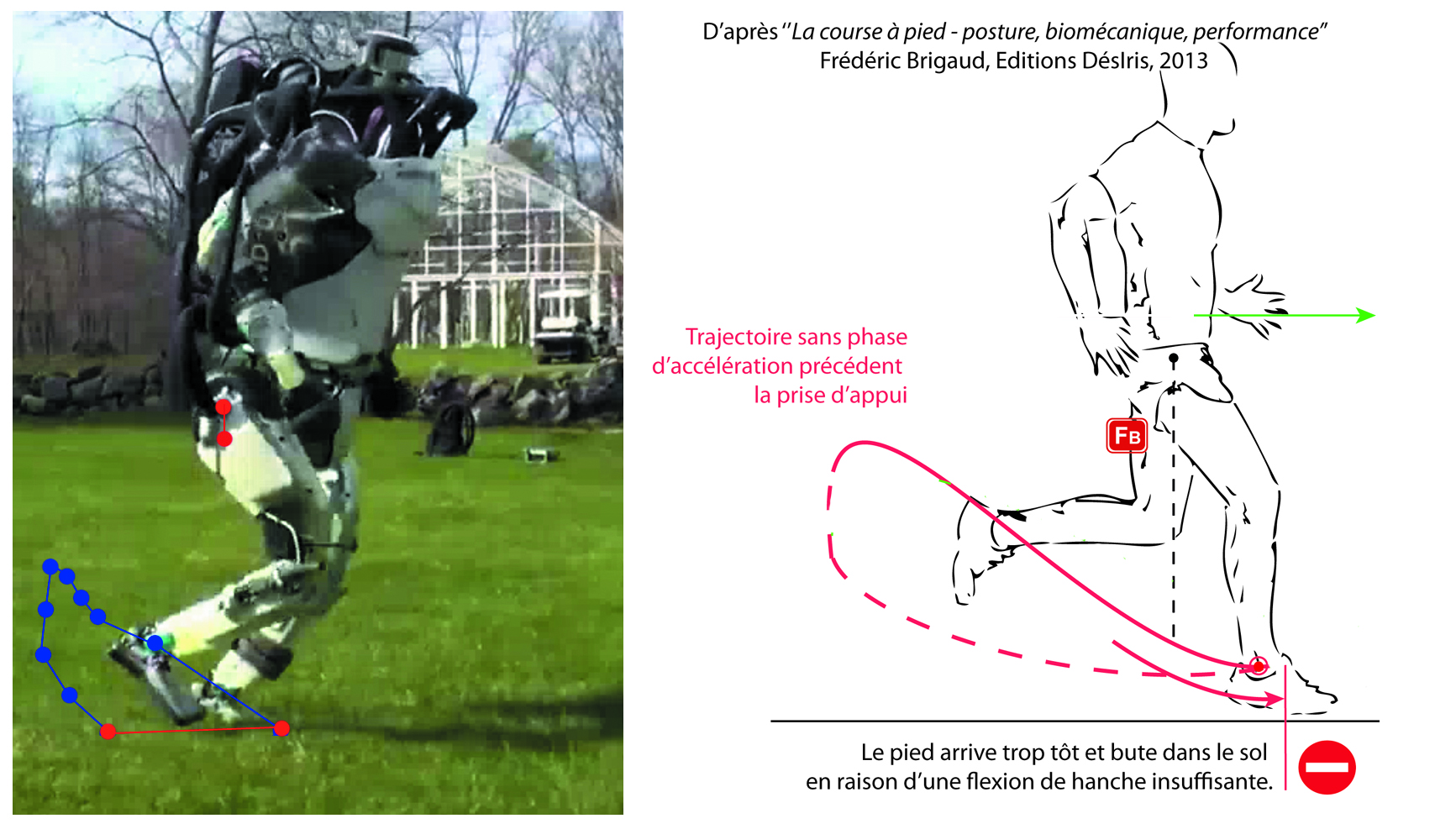
- Une forte oscillation verticale comparativement à celle d’un marathonien expérimenté, due principalement à une importante flexion du genou, de la hanche et de la cheville durant la phase d’amortissement et une poussée qui est par conséquence davantage verticale qu’horizontale. Cependant, cette oscillation verticale lui laisse le temps et dégage un espace suffisant durant la phase aérienne pour placer son pied sous son centre de gravité ou légèrement en avant, de déplier sa jambe et d’attendre, immobile, de se réceptionner sur son pied. En raison de la forme de sa poulaine, cette forte oscillation verticale empêche son pied de buter dans le sol.
- Une prise d’appui pied à plat. Il est difficile de voir précisément la technique de prise d’appui employée en raison de la hauteur de l’herbe sur laquelle il se déplace. Il semble prendre appui pied à plat et parfois légèrement par l’avant-pied ; puisque nous pouvons observer par instant une très légère descente du talon. Sur d’autres vidéos nous remarquons que ce modèle marche pieds à plat. Au fil des essais les ingénieurs de cette firme ont fait passer progressivement leur robot d’une forte attaque talon à une prise d’appui pied à plat, ou très légèrement talon avec un angle d’attaque de 3 à 4° (angle que forme le pied avec l’horizontale) selon que le robot se déplace sur un sol plat, en montée ou en descente.
- Un amortissement de la force de réaction au sol lors de la prise d’appui par une triple flexion de la jambe ; une flexion simultanée de la hanche, du genou et de la cheville. La flexion du genou et de la cheville lui permet également de ne pas stopper son déplacement vers l’avant. Ce n’est qu’une fois l’amortissement terminé qu’il produit une extension de hanche. Alors que chez le coureur humain expérimenté, il n’y a pas de flexion de hanche lors de l’amortissement, mais une extension en continue jusqu’à la propulsion.
- Un balancement des bras actif et utile. Un balancement des bras qui vient contrebalancer/équilibrer le mouvement alternatif des jambes. Un mouvement synchronisé sur celui des jambes qui s’adapte/varie pour équilibrer le corps. Nous observons plus nettement ce phénomène d’adaptation à la fin de la vidéo lorsqu’il saute par dessus un tronc d’arbre couché sur le sol. Ses bras se déplacent à des vitesses et dans des amplitudes différentes lors de la réception pour se stabiliser. Il serait intéressant d’amener les ingénieurs à développer un balancement des bras plus intense (augmenter l’amplitude tout en gardant la même fréquence) afin d’alléger et dynamiser la foulée.
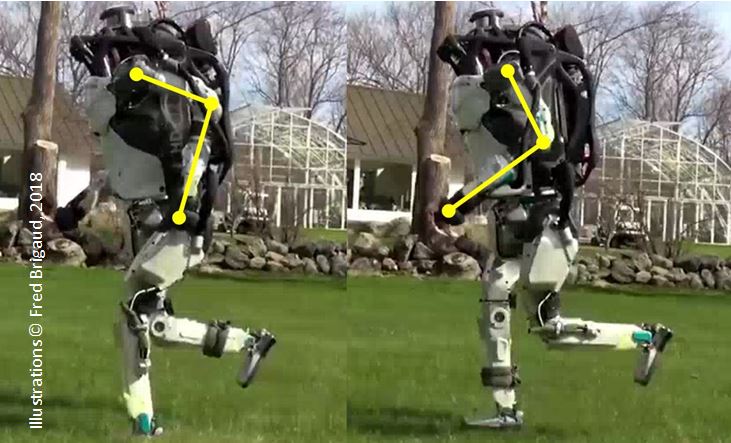
- Les bras se balancent avec les mains à la hauteur des hanches et en avant de celles-ci. Les coudes sont fixes. Le pivotement du buste est très faible voire inexistant. Le buste pivote légèrement seulement lorsque le robot change de direction. Il maintient l’axe de ses épaules dans la direction qu’il a choisi. Si son buste venait à pivoter à chaque prise d’appui, cette masse en mouvement le déstabiliserait et limiterait sa réactivité.
- Une relance à chaque foulée. Le robot n’utilise pas l’élasticité des matériaux qui le compose, probablement parce qu’il n’en est pas constitué. A la différence des prothèses en carbone d’Oscar Pistorius qui restituent au cours de la propulsion une partie de la force emmagasinée lors de l’amortissement. Dans ce cadre il serait intéressant de prendre connaissance du coût énergétique de chaque phase de la foulée du robot et de son évolution en fonction des stratégies de déplacement mises en place par les ingénieurs et des matériaux utilisés.
- Une foulée asymétrique en raison d’une reprise d’appui plus rapide à gauche qu’à droite et un temps de contact au sol plus long de 7 centièmes en moyenne de la jambe gauche par rapport à la jambe droite. Nous remarquons également que le mouvement de la jambe gauche est plus fluide durant la phase aérienne. De petites asymétries qui peuvent lui être fatales s’il devait rattraper un déséquilibre survenant durant ces 7 centièmes… Notons par ailleurs qu’une bande lestée est attachée au niveau de sa jambe droite (tibia), probablement pour compenser un déséquilibre de masse qui se répercute sur sa stabilité et sa gestuelle.
Augmenter son champ des possibles
Afin de vous rendre compte des limites de sa foulée bondissante, prenez le temps de la reproduire. Pour cela commencez par régler votre métronome sur 138 bpm (battement par minute) afin d’adopter sa cadence puis reprenez les différents points que nous venons d’évoquer. Vous ressentirez alors ce qu’elle autorise et ce qu’elle n’autorise pas, ainsi que son coût énergétique.
Temps mort, asymétries, défauts d’amplitude, techniques de prise d’appui, poulaines,… sont autant de paramètres qui déterminent sa marge de manœuvre, ses possibilités. Des ‘’défauts’’ qui peuvent provenir du software, de l’inertie inhérente aux pièces qui composent la machine,… ou du niveau de compréhension de la locomotion humaine et des interactions entre les différents segments. En résumé[2], d’un point de vue technique, si les ingénieurs de ce robot souhaitent se rapprocher progressivement d’une foulée plus efficace, qui autorise davantage de marge de manœuvre (de possibilités), ils vont devoir augmenter la flexion de hanche durant la phase aérienne (amélioration de la poulaine et de l’action des extenseurs de hanche lors de la phase d’appui), augmenter le grip sous le pied et produire une foulée avant-pied (sans quoi la traction et le travail des hanches ne pourront être possible, le pied dérapant sur le sol), développer une poussée plus horizontale pour diminuer l’oscillation verticale, augmenter la cadence et intégrer des matériaux ‘’élastiques’’ pour profiter d’un retour élastique à chaque foulée une fois lancé et diminuer ainsi la consommation d’énergie…
Un biomimétisme à tous les étages
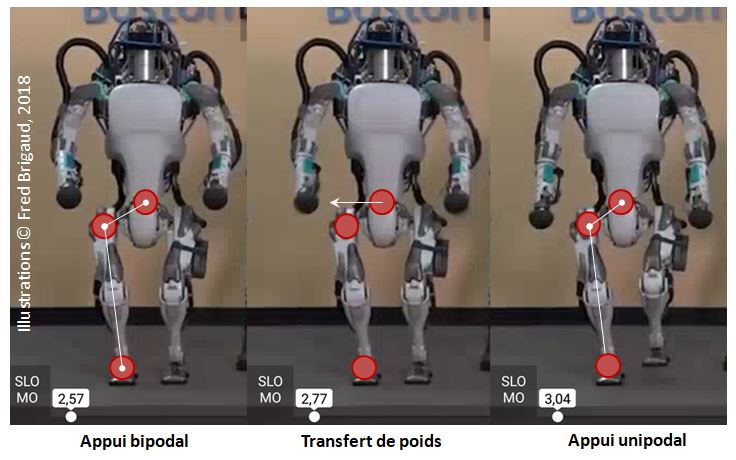
Nous remarquons par ailleurs que les jambes sont légèrement inclinées vers l’intérieur, 3 à 5°, à l’image de l’être humain. En statique et en dynamique sur un terrain plat ses pieds se retrouvent à l’intérieur des verticales passant par les hanches. Nous pouvons observer dans cette vidéo que lorsqu’il passe d’un appui deux pieds à un appui un pied depuis une position statique il effectue un très léger transfert de poids vers la jambe droite (la jambe d’appui). Les bras se mobilisent légèrement pour l’équilibrer. Plus le mouvement des bras est faible, moins le robot présente de déséquilibre pour passer d’un appui bipodal à un appui monopodal. Ce qui sous-entend la justesse de la machine quant à la répartition des masses, la longueur des segments, la puissance des moteurs au sein des hanches… N’oublions pas que la capacité à maintenir l’équilibre est plurifactorielle, c’est une somme de facteurs, certains pouvant compenser la faiblesse d’autres.
Atteindre le Graal
Il me semble que les ingénieurs, en cherchant à reproduire la foulée humaine, vont être amenés à en découvrir toutes ses subtilités tant sur le plan fonctionnel qu’architectural. Puisque l’aisance, la fluidité, la réactivité et la marge de manœuvre (le champ des possibles) dépendent des articulations qui nous composent, de leur degré de liberté (amplitude de mouvement et axe de mouvement), de notre capacité à dissocier et combiner les mouvements,… Ainsi, pour obtenir une locomotion similaire à celle que nous déployons il va falloir être en mesure de comprendre et de reproduire toute la complexité de notre architecture et de son mode de fonctionnement. Quels avantages évolutifs biomécaniques essentiels à notre locomotion vont-ils déceler ? Une réflexion et une quête passionnante à mener !
[1] Trajectoire de la cheville par rapport à la hanche.
[2] Nous proposons ici un raisonnement simplifié avec ‘’une cause un effet’’, alors que chaque élément agit sur plusieurs paramètres simultanément.
Pour aller plus loin
- Boston Dynamics.com »Atlas is the latest in a line of advanced humanoid robots we are developing. Atlas’ control system coordinates motions of the arms, torso and legs to achieve whole-body mobile manipulation, greatly expanding its reach and workspace. Atlas’ ability to balance while performing tasks allows it to work in a large volume while occupying only a small footprint. »
- Les différents sauts d’Atlas en vidéo

- Commander chez l’éditeur
- Commander via Decitre
- Commander via la Fnac
- Commander chez Amazon
- Version Apple book
- Version E-book
- Illustrations des captures d’écrans – Fred Brigaud
- Vidéos – Boston Dynamics (Page youtube)