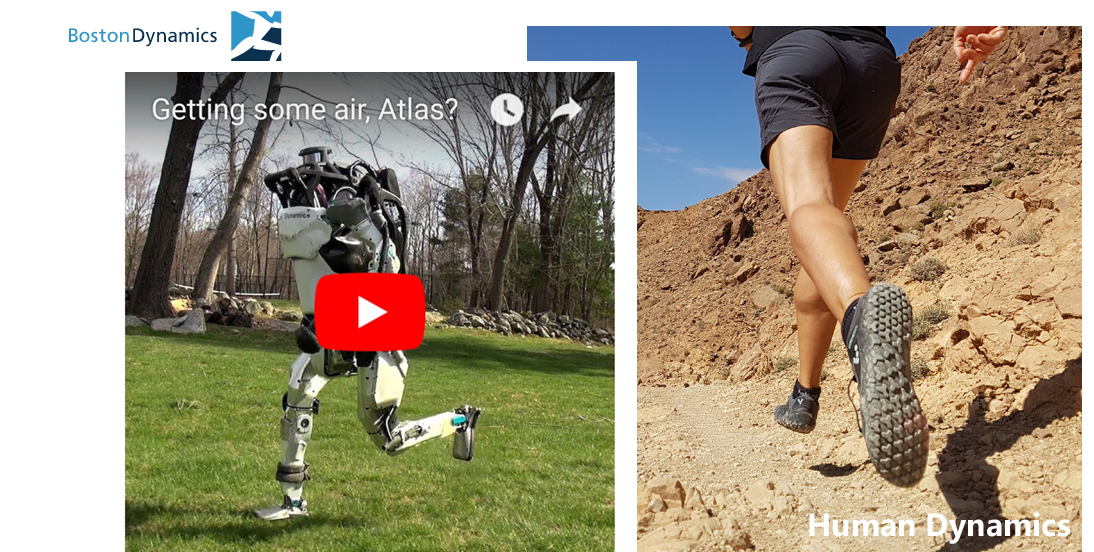
Analyse biomécanique de la foulée du robot humanoïde Atlas – Par Fred Brigaud
Il semblerait que nous ayons pour l’instant encore l’avantage sur Atlas (tel est son nom) au regard de cette première analyse technique de sa gestuelle. Une gestuelle qui comporte des asymétries et quelques défauts qui limitent son potentiel comme nous l’expliquerons. Cependant, une fois ces paramètres réglés, nous risquons d’être à la traine…
Pour cette analyse nous porterons notre attention sur la façon dont il mène l’action plus que sur la finalité de l’action qu’il mène. Celle-ci n’étant que la conséquence de la gestuelle mise en place, son déroulement. Par exemple lorsqu’il saute sur place tout en pivotant sur lui-même, ce n’est pas le fait qu’il y parvienne qui nous intéresse mais la façon dont il effectue cette action. La façon dont il coordonne les différentes parties de son corps et les mouvements qu’il produit, notamment pour se stabiliser une fois qu’il reprend appui. Des mouvements semblables à ceux que produit spontanément un être humain coordonné et un minimum expérimenté dans la même situation.
Continuer la lecture de « Qui de l’Homme ou du robot court le mieux ? »